Stairlift EA9 by CAMA Lift - A reliable platform lift for straight stairs
At CAMA Lift we offer a reliable and flexible solution for people with mobility challenges with our stairlift EA9. Our platform lifts are manufactured individually as to fit the specific stair’s dimension, which guarantees optimal fit and functionality.
Flexible installation and minimal reconstruction
Our stairlift can be installed directly onto a wall or pillars without substantial reconstruction work. Installation is therefore fast and uncomplicated, so you can enjoy your new handicap lift as soon as possible. Regardless of it being for indoor or outdoor use, our platform lifts can be customized to suit your needs.
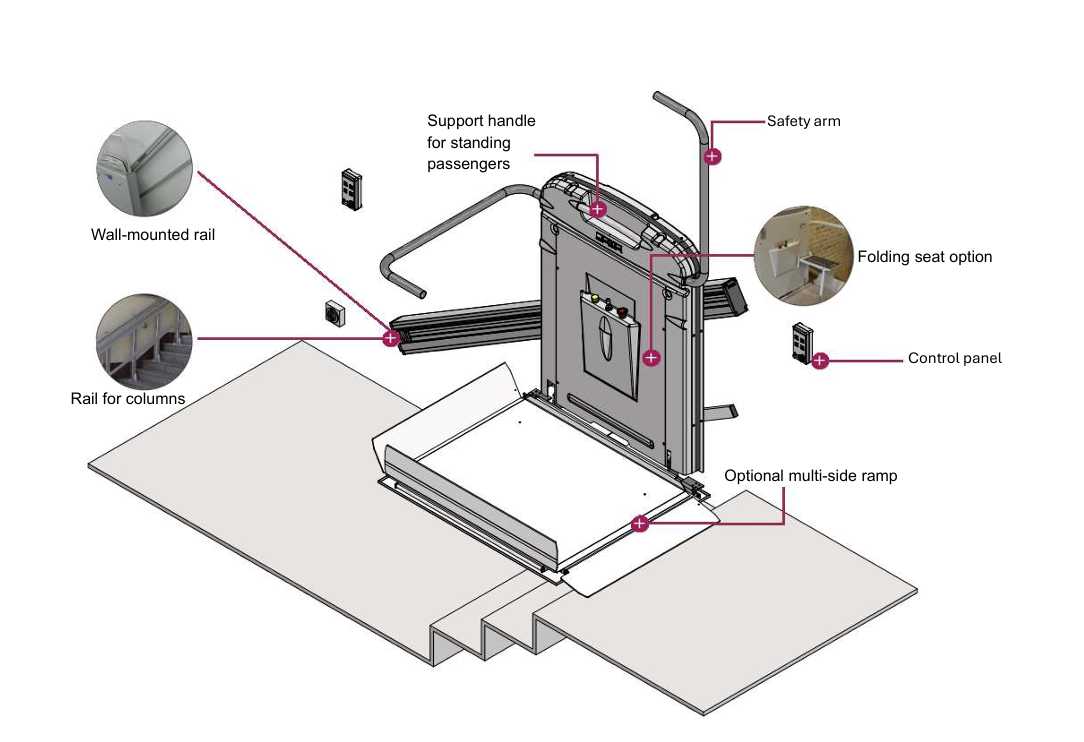
Strong features and safety
A platform lift from CAMA Lift consists of a strong wall rail made of aluminum and a lift wagon with a collapsible platform. Safety is a key concern, with safety arms and stops installed at both the front and back ends of the platform. Additionally, the lift can easily be reconstructed from right- to left-mounted and vice versa, making it flexible and economically advantageous.
Construction: Steel- and aluminium rails on the wall or on columns.
Dimensions:
Rail width: 68 mm.
Width folded up: 290 mm.
Width folded out: 1050 mm.
Platform standard size: 1000 x 800 mm.
Platform height: 45 mm.
Complete solution with individual adjustment options
When you order a stairlift from us, you receive a solution that contains everything you need for a safe and comfortable experience:
Individual adjustments and large flexibility in sensitive environments.
Optional colors (RAL code) and design additions to match your interior.
An emergency lowering device for extra safety.
CE-type verified assuring high quality and compliance with EU standards.
Softstart og stop som standard for en glidende og komfortabel kørsel Soft start and stop as a standard setting to ensure a smooth and comfortable ride.
Electrical connection: 1 phase, 230 Volt AC, making installation easy
Contact us to receive a non binding offer
If you are interested in a stair lift for wheelchairs that offers both flexibility and safety, Contact CAMA Lift today for a non-binding offer. We ship internationally and offer competitive prices.
Experience how our handilift can improve your daily mobility and life quality. At CAMA Lift we are dedicated to deliver a solution which makes a difference.